उत्पाद विवरण:
भुगतान & नौवहन नियमों:
|
| तालिका का आकार: | 320मिमी*320मिमी | कार्य परिशुद्धता: | 0.01 एम एम |
|---|---|---|---|
| वारंटी अवधि: | एक वर्ष के लिए नि: शुल्क | नियंत्रण प्रणाली: | विन्डोज़ एक्सपी |
| इनपुट शक्ति: | तीन-चरण 380V एसी | छवि वियोजन: | 1024*768 पिक्सल, 32 बिट |
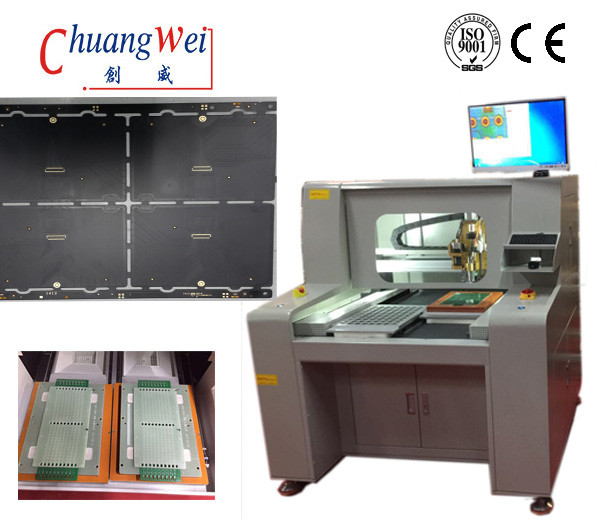
| प्रमुखता देना: | पीसीबी वेल्डिंग मशीन,पीसीबी टांका लगाने की मशीन |
||
स्वचालित धूल कलेक्टर और 0.01 मिमी परिशुद्धता के साथ सीएनसी राउटर मशीनसॉफ्टवेयर:
| नियंत्रण प्रणाली | विंडोज एक्सपी प्रोफेशनल (सेवा3, v.3244) |
| ऑपरेशन जीयूआई | चीनी विंडोज एक्सपी |
| प्रोग्राम संपादित करें | इनलाइन |
| दृष्टि प्रणाली | सीसीडी एओटीयू ऑफसेट |
| नियंत्रण प्रणाली | एफ 1.0.2 संस्करण |
हार्डवेयर:
SPINDLE मॉर्निंग स्टार धुरी और इन्वर्टर
| सीसीडी | सोनी 520 लाइन औद्योगिक कैमरा |
| लेंस | कम्प्यूटर EX2C |
| स्क्रू | टीबीआई सटीक ग्राउंड बॉल स्क्रू का आयात |
| मार्गदर्शक | HIWIN चौड़ाई आयातित रैखिक गाइड रेल |
| मोटर | जियाबाओ एलसीएफ श्रृंखला |
| आई/ओ कंट्रोल कार्ड | एचएफसी पीसीआई-9074 |
| चालक नियंत्रण कार्ड | एचएफसी पीसीआई-9074 |
| आई/ओ कार्ड | पीसीआई-9074-64pcs/-38pcs |
| स्थैतिक सफाई | STATIC-ST401A श्रृंखला |
| कम्प्यूटर | RMC-8401/6113LP4/300ATX/8651VNA/P4 2.8G 2CPU ((S) / 1G DDR/80G |
| मशीन इंटरफ़ेस | एओसी एलसीडी 17, "लॉजिटेक माउस |
प्रदर्शन मापदंड
|
कुल मिलाकर |
|
| आयाम ((W*D*H) | 1220 मिमी*1450 मिमी*1420 मिमी |
| वजन | 550 किलो |
| ऊँचाई के विस्थापन | 60~110 मिमी |
|
हेरफेरकर्ता |
|
| मोटर का प्रकार | जियाबाओ श्रृंखला |
| पोजिशनिंग दोहराव | 0.001 मिमी |
| धुरी कार्य क्षेत्र ((max) | 680 मिमी*360 मिमी*50 मिमी |
|
कार्यस्थल |
|
| कार्यस्थल | मानक, विशेषज्ञता |
| पीसीबी लोड/अनलोडिंग | मैनुअल |
| पीसीबी का आकार (अधिकतम) | 322mm*322mm |
| पीसीबी मोटाई (अधिकतम) | 5 मिमी |
|
फिक्स्चर |
|
| कठोरता स्थिरता | मानक |
| फिक्सेशन | यंत्र |
|
स्पिंडल मोटर |
|
|
शक्ति |
400W |
| स्पिंडल | 50000 आरपीएम/मिनट |
| रक्षा करना | स्व/पवन शीतलन |
| बदलना कटर | विशेषज्ञता |
|
रूटिंग क्षमता |
|
| काटने की गति (अधिकतम) | 100 मिमी/सेकंड |
| ड्राइविंग गति (अधिकतम) | 3000 मिमी/सेकंड |
| काटने की सटीकता | 0.01 मिमी |
|
वैक्यूम प्रणाली |
|
| वैक्यूम शक्ति | 2.2KW AC 380V |
|
वैक्यूम प्लम |
|
|
उपभोग्य वस्तुएं |
|
| शक्ति | 2.2KW AC380V |
| वायु आपूर्ति | 2~5 किलोग्राम/सेमी2 |
CW-F01 प्रोफ़ाइलः
CW-F01 स्वचालित दृश्य काटने की मशीन एक नई पीढ़ी का नवीनतम डिजाइन उच्च तकनीक उत्पाद है, जिसमें (मशीन विजन) स्वचालित दृश्य पहचान और सुधार कार्य है,उच्च सटीकता Panasonic सर्वो ड्राइव प्रणाली द्वारा लागू तेजी से और सटीक स्थिति का एहसास करने के लिए, काटने की उच्च गुणवत्ता और उच्च उत्पादकता सुनिश्चित करने के लिए अधिकतम 0.001 मिमी की सटीकता प्रदान करता है।
1प्रयोग में मशीन के लिए स्थितिः
मशीन को स्थिर रखा जाना चाहिए, बिना झुकाव या अस्थिर परिस्थितियों के।
निषिद्ध।
मशीन को उचित तापमान और आर्द्रता के साथ एक स्वच्छ स्थान पर काम करना चाहिए।
धूल के प्रभाव से।
बिजली के तारों को केवल एक पेशेवर इलेक्ट्रीशियन ही लगा सकता है।
मशीन की स्थापना और समायोजन विशेष प्रशिक्षण प्राप्त कर्मियों द्वारा किया जाना चाहिए।
विद्युत उपकरणों को अच्छी तरह से व्यवस्थित किया जाना चाहिए।
बिजली बंद अवस्था में होनी चाहिए और केवल योग्य कर्मियों द्वारा चालू की जा सकती है।
विद्युत संरचना को हवा के संपर्क में नहीं लाया जाना चाहिए।
मशीन चालू करने से पहले पूरी तैयारी करें।
मशीन के संचालन के नियमों से परिचित
संभावित सुरक्षा जोखिमों को बाहर रखा जाना चाहिए।
2मशीन अनुप्रयोग
यह मशीन समाप्त पीसीबी प्लेट को एसएमटी (सतह माउंट प्रौद्योगिकी) के साथ काटने के लिए लागू होती है, और मूल डिजाइन इरादे से कोई विचलन गलत माना जाता है।
3उचित उपयोग
मैनुअल के सभी निर्देशों का पालन करें
नियमित निरीक्षण और रखरखाव के नियमों का पालन करें
सुरक्षा उपकरण और दोष अलार्म प्रणाली ऑपरेटिंग सिस्टम विफलता विश्लेषणः
1. प्लेट में प्रवेश करने के लिए बटन दबाएं, यह प्रवेश नहीं करता है.
2प्लेट दर्ज करने के बाद मशीन काम नहीं करती है।
3जब काटने का काम पूरा हो जाता है, तो प्लेट बाहर नहीं निकलती।
कारण:
1. प्लेट में प्रवेश करने के लिए बटन दबाएं, यह प्रवेश नहीं करता है. यह बटन की विफलता के कारण होता है, जो बहुत बार दबाया जाता है और आंतरिक संपर्क विकृत हो गया था और प्रभावी ढंग से कनेक्ट नहीं हो सकता है.यह बलशाली बाहरी बल के कारण भी हो सकता है।, लोडिंग सर्किट के कनेक्शन को प्रभावित करता है।
2. प्लेट दर्ज करने के बाद मशीन काम नहीं करता है. यह मुख्य रूप से क्योंकि है कि
प्लेट के हवा सिलेंडर के पीछे चुंबकीय स्विच संकेत प्राप्त नहीं कर सकते। मशीन
कोई संकेत प्राप्त नहीं करता है अगर यह संचालित नहीं कर सकते हैं. सही स्थान पर इसे समायोजित करने के लिए हल करेगा
समस्या।
3. काटने के बाद, प्लेट बाहर नहीं निकलती है. मुख्य कारणः 42 हवा सिलेंडर और रेल के विरूपण, विद्युत चुम्बकीय वाल्व क्षति और इतने पर.
दृश्य प्रणालीविफलता विश्लेषणः
1ग्राफिक्स स्पष्ट नहीं हैं
2. स्थिति बिंदु प्राप्त करने में असमर्थ
कारण:
1. चमक या फोकल दूरी के गलत समायोजन के कारण ग्राफिक्स स्पष्ट नहीं हैं.
आप पैरामीटर को समायोजित करने के लिए प्रोसेसिंग पैरामीटर इंटरफ़ेस दर्ज कर सकते हैं जब तक कि ग्राफिक्स अपनी सबसे अच्छी स्थिति में और सबसे स्पष्ट तरीके से दिखाई नहीं देते।
2. स्थिति बिंदु पीसीबी प्लेट के रंग और वस्तु के लिए प्रासंगिक है नहीं मिल सकता
कैप्चर पोजिशनिंग बिंदु. कैसे पोजिशनिंग बिंदु बनाने के लिए मैनुअल में पेश किया जाता है, यदि निर्देश का पालन नहीं करते हैं, विफलता हो सकती है. इसके अलावा,मशीन ग्राफिक तीक्ष्णता और काटने सटीकता सुनिश्चित करने के लिए प्लेट रंग के आधार पर प्रकाश रंग समायोजित कर सकते हैं.
काटने की प्रणालीविफलता विश्लेषणः
1टूटा हुआ ब्लेड
2बर्स काटना
3विफलता विश्लेषणः
1ब्लेड के टूटने का कारण यह है कि गति बहुत तेज है। उपयोगकर्ता पीसीबी प्लेट की विभिन्न सामग्रियों और इसकी मोटाई के अनुसार काटने की गति निर्धारित करेगा।
2. काटने के बर्स होते हैं क्योंकि टूलींग पहनता है. सॉफ्टवेयर में 43 टूलींग के जीवन काल का निरीक्षण है; उपयोगकर्ता उस विकल्प पर क्लिक करके सीधे टूलींग की स्थिति को जान सकता है।यदि उपकरण का जीवन काल पूरा हो जाता है, सिस्टम उपयोगकर्ता को उपकरण बदलने के लिए याद दिलाएगा।
गति नियंत्रण प्रणालीविफलता विश्लेषणः
1. एक्स और जेड धुरी एक तरफ से दूसरी ओर और वाई धुरी रील आगे और पीछे से हिलाती है
2एक्स, वाई और जेड धुरी की चलती दूरी वास्तविक दूरी के अनुरूप नहीं है।
विफलता विश्लेषणः
1. लंबे काम के घंटों के कारण तीन अक्षों को जोड़ने वाले स्थिर भाग ढीले हो जाते हैं, जिसके परिणामस्वरूप एक्स, वाई और जेड अक्षों की हिलावट और असामान्य आंदोलन होता है। उपयोगकर्ता को मशीन के सभी बोल्टों की जांच करनी चाहिए।कारखाने से बाहर निकलने से पहले बोल्ट को कसकर फिक्स किया जाता है. यदि उपयोगकर्ता कुछ बोल्टों को गलत स्थान पर पाता है, तो उन्हें बहाल और ठीक करना चाहिए। नियमित समग्र रखरखाव की व्यवस्था की जानी चाहिए।
2. एक्स, वाई और जेड स्पिंडल की चलती दूरी वास्तविक दूरी के अनुरूप नहीं है। सर्वो आवेग संचालित है। निश्चित आवेग की दूरी निश्चित है। यह लीड स्क्रू के पिच से भी संबंधित है।ये दो कारक कारखाने में निर्धारित होते हैं. यदि आप गलती से उन्हें हटा देते हैं, तो मशीन उन्हें डिफ़ॉल्ट मान के रूप में पहचान लेगी, जिससे चलती दूरी और वास्तविक दूरी के बीच विसंगति होती है.उपयोगकर्ता को पैरामीटर रीसेट करने के लिए कंपनी से तुरंत संपर्क करना चाहिए.
धूल संकलन प्रणालीविफलता विश्लेषणःबुरा प्रदर्शनसमस्या निवारणः
1. धूल कलेक्टर के मोटर को सही दिशा में घूमने की पुष्टि करें, यदि नहीं, तो दिशा बदलने के लिए तीन तारों में से कोई दो 44 बदलें।
2. जांचें कि क्या कनेक्टर का पीवीसी ट्यूब ढीला या टूटा हुआ है और जांचें कि क्या वायु सिलेंडर काम करता है
3कृपया फिटिंग के अनावश्यक छेदों को सील करने के लिए टेप का उपयोग करें।
4. एक विशेष उपकरण बनाने का सुझाव दिया गया है।
5धूल संकलक के धूल के थैले को नियमित रूप से साफ करें।
हमारा बिक्री नेटवर्क:
![]()
अधिक जानकारी के लिए हमसे संपर्क करने के लिए आपका स्वागत है ((बनी):
ईमेलः s5@smtfly.com
व्हाट्सएप/वीचैट/स्काइप: +86 13684904990
व्यक्ति से संपर्क करें: Mr. Alan
दूरभाष: 86-13922521978
फैक्स: 86-769-82784046